by Hunter Brendel, Master of Maritime Archaeology student
It is a certain fact that all field archaeologists are aware of – equipment does not always behave the way you want it to. Yet when it doesn’t, the opportunity for “McGuiverism” is there. During the Flinders 2013 field school at Port MacDonnell, we had certain technical issues with the magnetometer we were using. Luckily for us, the staff came prepared with underwater metal detectors. By using metal detectors, we were able to conduct transect surveys to delineate a possible shipwreck site on shore (Figure 1). Students used the metal detectors to detect pings that were then marked on a survey plan.

Figure 1. Myself (left) and fellow student Chelsea Colwell-Pasch (right) conducting a metal detector survey on shore during the 2013 Flinders University Maritime Archaeology field school.
Later on, we used the same transect method to delineate our shipwreck, Hawthorn, which was located approximately 10 meters off shore. Since the wreck was in the surf, we students were able to replicate the transect survey techniques used on land by snorkeling and marking pings on a Mylar survey plan slate. All we needed to do was give a thumbs up every time we heard a ping, and our dive buddy was there to mark where the ping came from. Two other students held down the transect line and moved it every time we cleared a lap. Simple enough, yet effective in practice.
The Lighthouse Archeological Maritime Program (LAMP) devised a similar strategy for their 2014 Storm Wreck field season after experiencing magnetometer issues themselves. Brian McNamara, a fellow 2013 Flinders field school student and LAMP archaeologist, devised a plan to use a metal detector to delineate the Storm Wreck site. Only this time was different. Site conditions such as an eight meter depth of the site, poor visibility (really poor visibility), and chance for swells were unlike those we experienced in South Australia. Not to mention it had to be done on SCUBA.
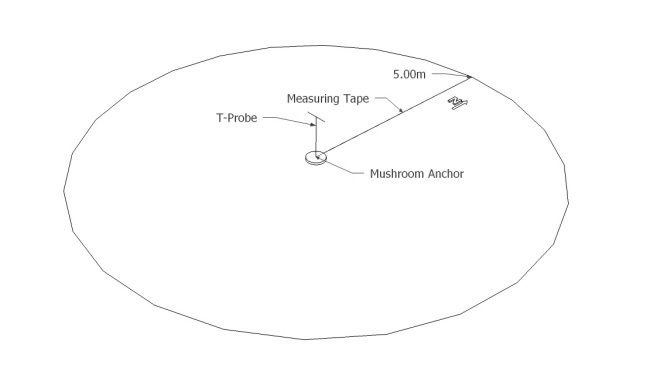
So we hit the drawing board and came up with a plan to delineate the Storm Wreck site by using an underwater metal detector. I was to carry out the trial run by delineating a 10×10 meter area south of the Storm Wreck site (Figure 2). Listed are the materials we needed to SCUBA with to effectively carry out the underwater detector survey:
- A ten meter polypropylene transect line with every meter marked with a zip tie. At the five meter mark was a looped zip tie.
- Two fiberglass rods.
- Measuring tape.
- Down line with a diver flag attached to a buoy.
- A mushroom anchor to hold the down line and western end of the transect line.
- A weight belt and weights to hold the the eastern end of the transect line.
- Underwater metal detector.
- Mylar slate and pencils (lots of pencils) for a survey plan.
- SCUBA gear, cylinder, compass, etc.
First, my student dive buddy and I brought with us a mushroom anchor and down line with a diver flag attached to a buoy. Then we swam to a screw anchor that held southern end of the baseline in place. At the screw anchor, my student dive buddy held the middle loop of the polypropylene transect line in place. I swam east, end of the transect line in-hand, to stretch out the transect line, which I tied to the weight belt so that it was secure. I inserted one of the fiberglass rods through the weight belt as a reference marker. Using my compass, I ensured that the line was on an east-west, or 180 degree, bearing. I swam back to my dive buddy, stretched out the other half of the transect line, secured it to the mushroom anchor, and used my compass to make sure the east-west bearing was still accurate. I then planted the other fiberglass rod through the mushroom anchor.
Now the survey could start.
My dive buddy and I swam east-west along the ten meter transect line with the underwater metal detector in hand. Covering two meters to north and south of the transect line with the metal detector, we would pick up pings and then mark their location on the Mylar survey plan slate. As the designated metal detector holder (aka “Wielder of Truth”), I would tap my dive buddy’s mask every time I heard a ping and my dive buddy would mark its location on the slate. After we cleared the ten meter transect line, we would measure and move the line two meters south and repeat the survey. When five survey tracts were completed, we would have covered a 10×10 meter area south of the site.
Believe it or not, the metal detector survey to delineate the Storm Wreck was a resounding success. All students and supervisors had an opportunity to conduct the survey around the northern, eastern, western, and southern periphery of the Storm Wreck site. LAMP staff hope to superimpose the results of the survey on an up-to-date site plan of the wreck. Piece of cake.

Figure 2. “Trust me, I’m an archaeologist.”