
While maritime archaeology is a rather new discipline compared to terrestrial archaeology, deep-water archaeology (greater than 100 metres) is so recent that it is still largely in its infancy. This is due to the extreme conditions of the deep ocean and lack of technology necessary to reach such depths. In addition, there is the prohibitive cost of deep-water exploration. Expeditions that use ocean-class research vessels can cost $40,000 USD or $44,697 AUD per day and easily exceed $1 million over a month-long period (Ballard 2008:x). However, multi-disciplinary projects that foster cooperation with oceanographers, biologists, and engineers can reduce the cost of research and allow each scientist to collect much needed data. Continuous advancements in the technology of human-operated vehicles (HOVs), remotely operated vehicles (ROVs), and autonomous underwater vehicles (AUVs) are allowing maritime archaeologists to reach greater depths and explore hidden cultural clues in this largely unexplored world.
Techniques commonly used by maritime archaeologists for shallow-water surveys, such as side-scan sonar, magnetometers, and sub-bottom profilers, are being applied to HOVs, ROVs and AUVs to explore the depths of the ocean. Side-scan sonar emits sound waves that strike the sea floor and creates imagery by recording the timing and amplitude of those sound wave reflections. Magnetometers are used to locate man-made objects by detecting anomalies in the normal magnitude and direction of the earth’s magnetic field. Sub-bottom profilers are similar to side-scan sonar in that they emit sound waves towards the sea floor; however, the sub-bottom profiler’s sound waves penetrate the sea floor in order to identify different layers of sediment (Ballard 2008:263-274). By utilising these devices in conjunction with HOVs, ROVs and AUVs, archaeologists are able to map and survey depths greater than 100 metres.
Human-Operated Vehicles
HOVs are also known as human-operated submersibles or simply submersibles. Many submersibles are limited in their ability to survey large areas. This is due to their reliance on a human occupant/operator, which limits the amount of time they can stay on site. Although HOVs are limited by time, they provide an advantage over ROVs and AUVs because they can “typically lift heavier objects and carry more equipment and/or samples” (Ballard and Coleman 2008:12). An excellent example of an HOV is Alvin, a U.S. Navy-owned Deep Submergence Vehicle built in 1964. It is able to dive to a depth of 4,500 metres and remain below the surface for up to 10 hours (WHOI 2013). Alvin is outfitted with video cameras, lights, and two robotic arms that allow the vessel to carry 680 kilograms of samples. Alvin is perhaps best known for its involvement in the exploration of RMS Titanic in 1986 (WHOI 2013).

Figure 1: Human Occupied Vehicle Alvin (Photo by Mark Spear, Woods Hole Oceanographic Institution 2013)
Remotely Operated Vehicles
ROVs are similar to HOVs except that instead of having an occupant inside the vehicle, the ROV is controlled from a support vessel on the surface. ROVs are tethered to the surface vessel by fibre-optic cables and controlled via fibre-optic telemetry (Gregory et al. 2008:17). These cables allow the operator to control the movement of the ROV as well other functions such as lighting, cameras and manipulator arms. ROVs are better adapted for surveying larger areas than HOVs, but are still limited by the cables that attach them to the support vessel. ROVs are sometimes used in tandem with a towsled that is positioned between the support vessel and ROV. The benefit of using a towsled is that it absorbs the movement of the support vessel and prevailing sea conditions, which allows the ROV to work undisturbed. The towsled often sits above the sea floor and provides additional lighting to reduce backscatter from particles in the water when images are being taken. Besides surveying, ROVs can be used to excavate artefacts from the sea floor. One example of this type of vehicle is the ROV Hercules and its towsled Argus. Hercules is equipped with digital cameras and sonar for site mapping, as well as tube corers to extract samples of sediment in preparation for excavation (Webster 2008:45). The ROV also features jets that provide a flow of water to clear sediment from artefacts, as well as a suction hose to lift material (Webster 2008:53). In addition to this useful tool, Hercules’ manipulator arms can be fitted with various hand tools such as brushes and scrapers (Webster 2008:56).
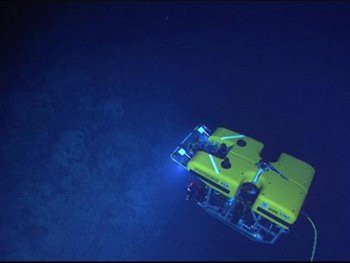
Figure 2: ROV Hercules viewed from towsled Argus (NOAA 2013)

Figure 3: Towsled Argus being lowered into the water (NOAA 2013)
Autonomous Underwater Vehicles
AUVs differ from the two previously mentioned vehicles in that they are not controlled by an operator but rather programmed to survey a certain area. In addition to not requiring an operator, the major advantages of AUVs over HOVs and ROVs is that they can be deployed and left to survey large areas for between 24 and 72 hours without the need for a support vessel. This saves thousands of dollars in operating costs (Bingham et al. 2010:703). While AUVs tend to be used more for commercial purposes, such as surveys for natural resources, their role in archaeology is significant and growing. AUVs have precise on-board navigation systems that make use of global positioning system (GPS) and differential global positioning system (DGPS) that link to the support vessel. The exact position (3-5 metre accuracy) of the AUV is essential to mapping and surveying the sea floor (Warren et al. 2007:4). Many AUVs carry chemical sensors for testing the environment in addition to multibeam sonar (similar to side-scan sonar), a sub-bottom profiler, and magnetometer. AUVs are limited by the power supply needed to both run the vehicle and maintain its illumination lamps (Bingham et al. 2010:703). Despite their limitations, AUVs are ideal for conducting general surveys and producing photomosaics of the sea floor with limited detail. A great example of AUV application within deep-water archaeology is the SeaBED model used to document the Chios shipwreck site in the northeastern Aegean Sea (Bingham et al. 2010:702-715).
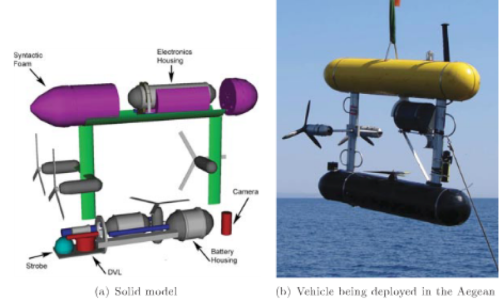
Figure 4: Model of SeaBED AUV being deployed (Bingham et al. 2010:705)
The future of maritime archaeology is continually evolving as technological advances in various underwater vehicles allow for the ocean to be explored and mapped at greater depths. Multi-disciplinary cooperation has facilitated archeologists’ access to these forms of technology and increased the amount of data they can collect. This in turn has enabled the discovery and documentation of ancient shipwrecks and landscapes previously unknown to modern archaeology.
References
Ballard, R. and D.Coleman
2008 Oceanographic Methods for Under Archaeological Surveys. Archaeological Oceanography, edited by Robert Ballard, pp. 3-14. Princeton University Press, Princeton, New Jersey.
Ballard, R.
2008 Glossary. Archaeological Oceanography, edited by Robert D. Ballard, pp. 263-274. Princeton University Press, Princeton, New Jersey.
Ballard, R.
2008 Introduction. Archaeological Oceanography, edited by Robert Ballard, pp. ix – x. Princeton University Press, Princeton, New Jersey.
Bingham, B., B. Foley, H. Singh, R. Camilli, K. Delaporta, R. Eustice, A. Mallios, D. Mindell, C. Roman, and D. Sakellariou
2010 Robotic tools for deep water archaeology: Surveying an ancient shipwreck with an autonomous underwater vehicle. Journal of Field Robotics 27(6): 702-717.
Gregory, T., J. Newman, and J. Howland
2008 The Development of Towed Optical and Acoustical Vehicle Systems and Remotely Operated Vehicles in Support of Archaeological Oceanography. Archaeological Oceanography, edited by Robert Ballard, pp. 15-29. Princeton University Press, Princeton, New Jersey.
National Oceanic and Atmospheric Administration
2013 Hercules (ROV) and Friends, Electronic document, http://oceanexplorer.noaa.gov/technology/subs/hercules/hercules.html, accessed 10/9/13.
Warren, D., R. Church, and K. Eslinger
2007 Deepwater Archaeology with Autonomous Underwater Vehicle Technology. In Offshore Technology Conference. Houston Texas Electronic Document, e-book.lib.sjtu.edu.cn/otc-2007/pdfs/otc18841.pdf, accessed 10/9/13
Webster, S.
2008 The Development of Excavation Technology for Remotely Operated Vehicles. Archaeological Oceanography, edited by Robert Ballard, pp. 41-64 Princeton University Press, Princeton, New Jersey.
Woods Hole Oceanographic Institution
2013 Human Occupied Vehicle Alvin. Electronic document, http://www.whoi.edu/alvin/, accessed 9/9/13.

Within the next few decades maritime archaeology will reveal things that I believe, will not only change, but completely rewrite the history of mankind. It is one of the most important fields of study in modern times, equal in importance with the exploration and transportation of outer space. Dive deep!
Great blog post Josh, how exciting to explore the true last frontier of the world…