
Trends are not a new concept to archaeology. The patterns found in the archaeological record are what lead to the wider inferences made about past cultures or behaviours. However, the latest trend in archaeology isn’t about similarities in information sets or assemblages,but rather the movement towards in situ (in place) preservation of archaeological sites, especially in underwater archaeology. I use the term ‘trend’ loosely, as it implies that in situ preservation is a ‘fad’ that will become obsolete given enough time or with the arrival of a newer, en vogue concept. I actually believe the opposite is true, that in situ preservation is here to stay and that it is the future of archaeology, above or below the water. This is not so much my opinion, but more of an observation. Looking at the international legislation that surrounds underwater cultural heritage (UCH), one cannot help but see that in situ preservation is pressed as the primary approach (UNESCO, 2001: Article 2,5; UNESCO Annex, 2001:Rule 1) and in many introductory texts, non-invasive survey methods are considered the future (Bowens, 2009:5). We need to know what is under the seabed in order to know if archaeological sites lie beneath, but we are trending away from invasive methods of surveying like subsurface testing. This leaves non-invasive approaches like geophysical surveys and remote sensing.
Geophysics in underwater archaeology is the scientific study of features below underwater and under the seabed using a range of specialized instruments while remote sensing is obtaining images of a phenomena from a distance (Bowens 2009: 217). It is common for these two methods to be grouped together, as they both deal with the ability to collect large amounts of data quickly and understand the scale of the surveyed site without having to be directly on or necessarily near it. In the past, geophysics was used primarily for site prospection but has been applied more recently to research and site management (Bowens 2009: 103). Geophysical and remote sensing surveys allow for the coverage of large areas relatively quickly and economically. They are not meant to replace divers on a site, but aid in timely identification of site locations, site distribution, site boundaries, and sub-seabed phenomena and are particularly useful in environments with poor underwater visibility, strong currents, or any other environmental hazards. Geophysical and remote sensing surveying methods will be discussed and can be grouped into three types: acoustic systems, magnetometers, and submersibles. These methods are used over a large area to ensure complete coverage of the site and its environmental context and are very accurate when used with global positioning system (GPS) satellites and differential global positioning system (DGPS) land-based reference stations. Using both will increase site position fixing as DGPS makes range corrections for GPS satellites; the addition of an on-boat GPS antenna increases accuracy (Bowens 2009:94).
Acoustic Systems:
These systems are the most commonly used geophysical method for underwater archaeological surveying. Sonar,or sound waves, are used in order to obtain the desired information. Some forms of acoustic surveying systems are: echo-sounders, multibeam sonars, side scan sonars, and sub-bottom profilers (Bowens 2009:104). The general idea behind these types of non-invasive systems is to use reflected sound waves (echoes) to construct a picture of what the underwater site and bathymetry, or depth over seabed, looks like. Figure 1 shows the different components and general setup for using side scan sonar. Side scan sonar uses a wide-angle pulse of sound (emitted from the towfish) and the strength of the reflected scattered sound to display an image (Figure 2). The coverage of the side scan sonar can reach over 100m on either side of the track line. The track line is a gap in between the two sides; its size varies by size of coverage and depth. It is a ‘dead space’ of sorts where there is too much interference between the two sides to get an accurate image. This problem can be countered by overlapping boat runs to ensure full coverage. Acoustic shadows are also important as they can give a general description of objects that sit proud (vertical) to the seabed (Bowens 2009:108), see Figure 2.
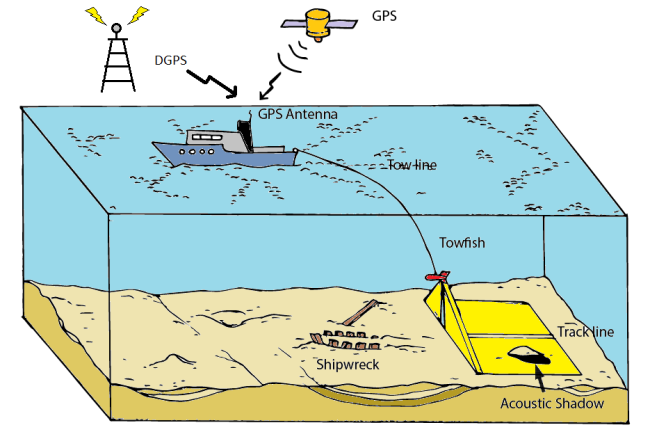
Figure 1. The components and set up of a side scan sonar (image created by author)
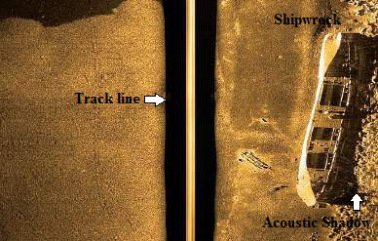
Figure 2. The results of a side scan sonar survey (after Kainic 2012)
Echo-sounders and multibeam sonars are generally used to gauge vertical measurements or depth. Echo-sounders were first to be applied to maritime archaeology and used a single transceiver to send an acoustic pulse straight down to the seabed and read the reflection or echo on a single prescribed spot. Multibeam sonar (also known as swath bathymetry) records a continuous thin strip of depth directly below and to the side of the boat (Figure 3), effectively scans the surface of the seabed, and creates a 3D image via colour gradations to highlight depressions and outcrops, as represented in Figure 4 (Bowens 2009:106). Sub-bottom profiling is the only means to locate buried wooden material culture underwater; metal material culture will be discussed in the next section. Strong short pulses of sound are shot into the seabed sediment and ‘reflect’ anything that sends the echo back earlier than the rest. The two forms of sub-bottom profiler are single-frequency pulse (also known as ‘pingers’ and ‘boomers’) and swept-frequency pulse (‘chirp’) (Bowens 2009: 109). Using both devices ensures the best coverage and penetration of the seabed.
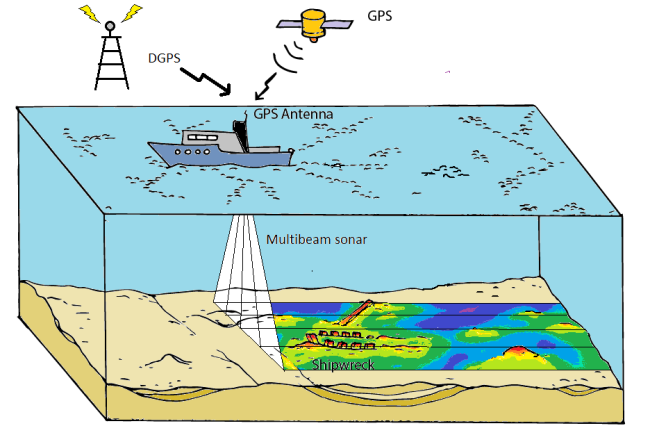
Figure 3. The setup of a multibeam sonar survey (image created by author)
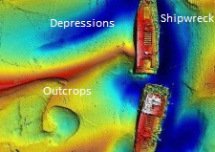
Figure 4. The results from a multibeam sonar survey, red are closer to the surface while blue is deeper (after Cox 2012)
Magnetometers:
Magnetometers measure the strength of the earth’s magnetic field and are used to detect the presence of ferrous material (iron) by the variations they cause in said field (Bowens 2009:111). This may include both man-made objects, like the cannon in Figure 5, or geological formations. They are usually deployed in a towing array to inhibit interference from the tow boat and the data they collect are plotted (or ‘contoured’) according to varying magnetic intensities (Figure 6).
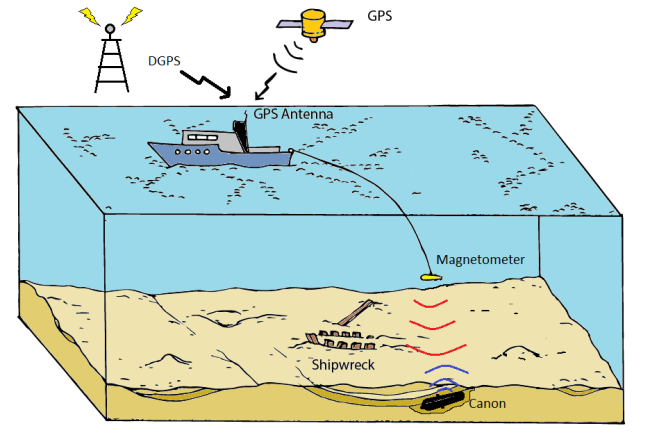
Figure 5. The setup of an underwater magnetometer survey (image created by author)

Figure 6. The results of a magnetometer survey (Spirek 2001: Figure 2)
Submersibles:
Submersibles for archaeological surveying come in three forms: remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), and manned submersibles. They can perform many tasks including visual assessments or searches, and photography, thereby negating the need for divers in the water (Bowens 2009:112). ROVs are piloted from the boat and can be outfitted with an array of data-collection devices like acoustic systems or video recorders (Figure 6). AUVs can be outfitted with these devices as well, but are not piloted nor are they attached to a vessel. Manned submersibles can complete the same aforementioned tasks but with an on-board pilot for more control and precision. manned submersibles fall into three categories; commercial, tourism, and research (Kohnen 2005:121). (Figure 7).
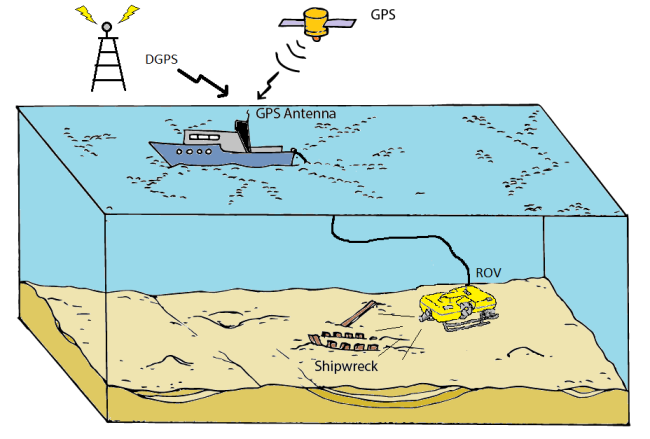
Figure 6. The setup of a remotely operated vehicle (ROV) (image created by author)

Figure 7. The Institute of Nautical Archaeology’s (INA) manned submersible Carolyn in operation in the Aegean Sea (Kohnen 2011)
We know that the goal is to try to leave the archaeological site in its original context, as well as the best non-invasive ways to survey it, but why go through all the trouble? As archaeology is an ever changing field that progresses in parallel with new technology, it is undeniable that the information we gather ten years from now will be of a higher quality and degree of accuracy than what we collect today. This means that whatever we choose not to disturb today may never need to be disturbed in the future. Yet we must still yield a high degree of archaeological data,and therefore non-invasive survey methods, like those mentioned above, are an investment for our future AND our past.
References
Bowens, Amanda (editor)
2009 Underwater Archaeology: The NAS Guide to Principles and Practice. 2nd ed. Blackwell Publishing, West Sussex.
Cox, Marijke
2012 Building an Estuary Airport Close to Sunken Warship Branded ‘Bonkers’. Electronic document, http://www.kentnews.co.uk/news/building_an_estuary_airport_close_to_sunken_warship_branded_bonkers_1_1416102, accessed 30/08/2013.
Kainic, Pascal
2012 Search and Recovery Side Scan Sonar. Electronic document, http://www.yousaytoo.com/search-and-recovery-side-scan-sonar/1924787#:image:2729577, accessed 30/08/2013.
Kohnen, William
2005 Manned research submersibles: State of technology 2004/2005. Marine Technology Society Journal, 39(3): 121-126.
Kohnen, William
2011 Carolyn‘s 10-year Aegean voyage for INA. Electronic document, http://nauticalarch.org/news_events/news_events_archives/prior_to_2011/carolyn_takes_a_break/, accessed 01/09/2013.
Schott, Becky K.
2013 The Wrecks of Thunder Bay: A Photo Essay. Electronic document, http://www.alertdiver.com/m/?a=art&id;=780, accessed 30/08/2013.
Spirek, James
2001 Port Royal Sound Survey: Search Begins for Le Prince. Legacy, 6(2):28-30.
UNESCO 2001 Convention for protection of underwater cultural heritage.
